



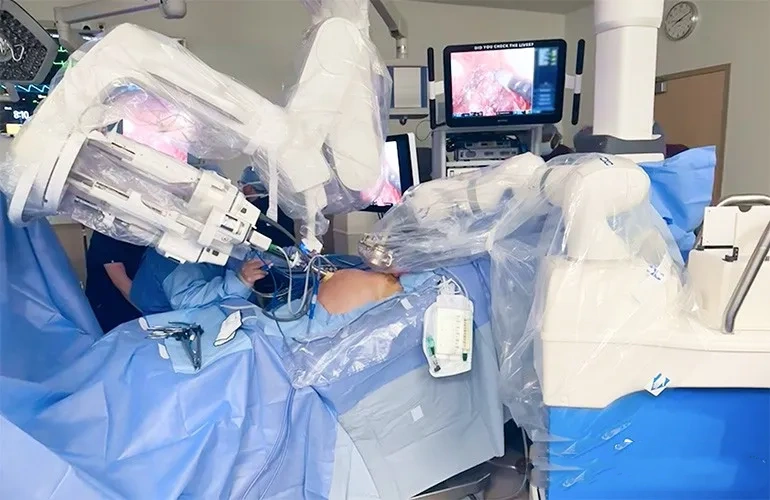
最近,美国德克萨斯大学西南医学中心的 Jeffrey Cadeddu 医生使用 Levita Magnetics MARS(磁辅助机器人手术)系统和 Intuitive da Vinci SP(单端口)系统进行了前列腺切除术,这不仅体现了机器人手术领域技术的持续进步,也为多系统协作在复杂手术场景中的应用提供了范例。这一进步在电子医疗器械展上也被人们广泛关注。
双系统协作的技术特点
相比传统的单一机器人系统,双系统模式在技术架构上更注重协同性与灵活性。此次手术中,双系统通过以下方式实现了技术突破:
1. 功能分区与任务优化
双系统在操作流程中实现了不同机械臂功能的分工协作,避免了传统单系统在复杂操作中的资源瓶颈。例如,一套系统负责主操作,另一套系统提供辅助定位与视野扩展。
2. 动态路径规划
系统之间通过实时数据交互,实现了机械臂的动态路径优化。多系统间的干扰被有效降低,从而减少手术过程中机械臂的碰撞风险。
3. 操作范围扩展
双系统协同能够同时覆盖更大范围的操作区域,特别是在多任务操作或解剖结构复杂的手术中,提供了更灵活的适配能力。
临床应用的潜在价值
双系统协作模式为解决复杂手术中的技术难点提供了有效途径,其核心价值体现在以下几个方面:
1. 复杂手术场景中的适用性
双系统模式在解剖复杂、空间受限的手术中表现尤为突出。例如,前列腺手术中狭窄区域的精准操作,得益于系统间的高效协作和精准定位。
2. 多任务手术操作能力
双系统为多任务的并行操作提供了硬件支持,可以在单次手术中完成更多复杂步骤,有助于缩短手术时间并减少术中切换。
3. 推动系统开放与标准化
双系统的成功实践,为不同品牌机器人系统间的兼容性与协作奠定了基础。这不仅能降低设备间的技术壁垒,也为未来行业标准的制定提供了实践依据。
未来发展方向
随着机器人手术技术的快速演进,双系统协作的成功为行业带来了新的启示。以下方向将成为未来研究和开发的重点:
1. 跨品牌系统协作
开放式架构设计将推动不同厂商设备间的兼容性,为双系统乃至多系统协作模式提供更多可能性。
2. 智能协同算法开发
进一步优化双系统的动态协作能力,例如实时路径规划、任务分配优化和冲突预警,将提升系统的自主性和可靠性。
3. 手术流程的深度集成
在双系统的基础上,实现与术中导航、影像引导及术后评估的全面集成,推动手术全流程的数字化和智能化。
结语
此次双系统协作手术的成功,不仅是机器人手术技术发展的重要里程碑,也是复杂手术流程优化的关键突破。未来,多系统协作将成为机器人手术技术的重要趋势,为外科领域的精准性和效率提升提供更全面的解决方案。
文章来源: 灰水獭笔记
若涉及侵权,请立刻联系删除
关键字:



