



1.腹腔镜手术背景介绍
2.从手机器人基本结构组成
3.从手机械臂设计(重点是远心机构)
4.手术器械设计(带腕部关节的设计)
5.腕关节与小爪关节解耦设计(这是重点)
1.腹腔镜手术背景介绍
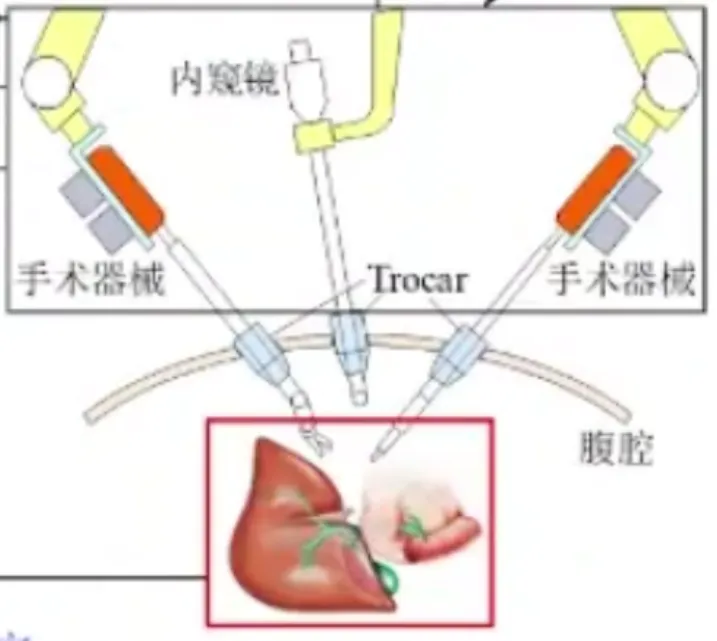
传统的腹腔微创外科手术是借助腹腔镜和手术器械来完成手术操作的。腹腔镜和手术器械通过体表约5~10mm的手术切口进入患者腹腔,医生在腹腔镜提供的病灶区域的视觉显示下,操作手术器械完成手术任务。
图片来源:Problem Based Learning
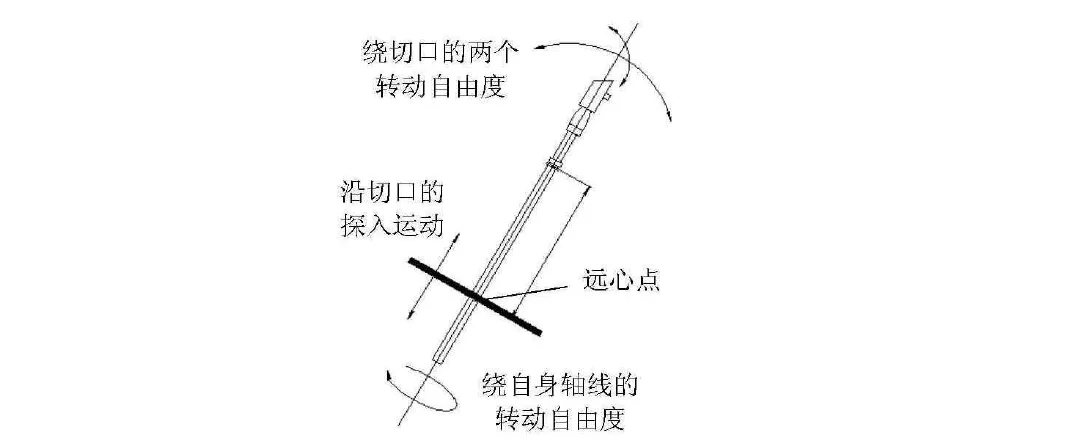
微创手术是靠手术器械和腹腔镜探入体表切口进行手术任务的,由于体表切口的限制,为保证手术的安全性,要求手术器械和腹腔镜绕体表切口做“定点”运动。手术器和腹腔镜在体表切口处的运动自由度如图所示,为防止手术器械和腹腔镜对体表切口造成划伤,要求手术器械和腹腔镜在体表切口只允许做以下四个自由度运动:沿体表切口的探入运动自由度,绕体表切口的两个转动自由度,绕自身轴线旋转的转动自由度,而手术器械和腹腔镜在体表切口处沿切口切线方向的直线运动自由度是必须被限制的。手术器械和腹腔镜在体表切口处的这种类似“定点”运动称为远心运动,手术切口称之为远心点,将实现远心运动的机构称之为远心机构。
图片来源:Problem Based Learning
手术机器人(从手)的结构设计重点是机械臂远心机构和手术器械。
2.从手机器人基本结构组成
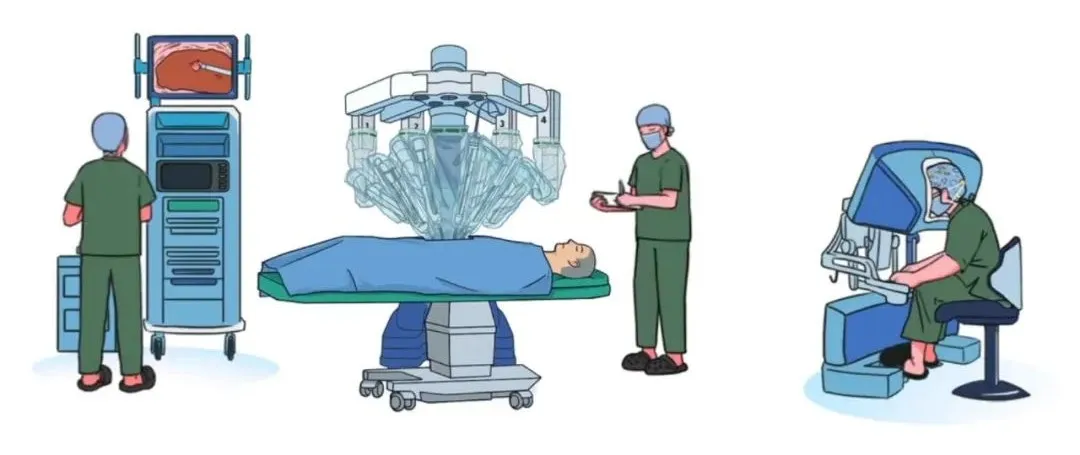
腹腔微创手术机器人系统的工作模式应为主从式操作模式,即医生通过操作主操作手来控制从手机器人运动,从手机器人的功能是代替医生把持特制的手术器械,并在医生的控制下完成手术操作的基本动作。
图片来源:Problem Based Learning
根据从手机器人的功能,将从手机器人的设计分为两部分,一部分是机器人车,另一部分是手术器械。机器人车由基座和数个机械臂构成。机械臂的功能相同,都是用来夹持器械完成手术操作,区别仅在于机械臂末端夹持的器类型不同。根据机械臂要实现的手术任务要求,机械臂应由定位关节和远心机构两部分构成。定位关节用来完成术前手术器械(腹腔镜)到达切口点的定位,远心机构用来夹持手术器械(腹腔镜)并保证术中手术器械的运动是围绕切口的远心运动。
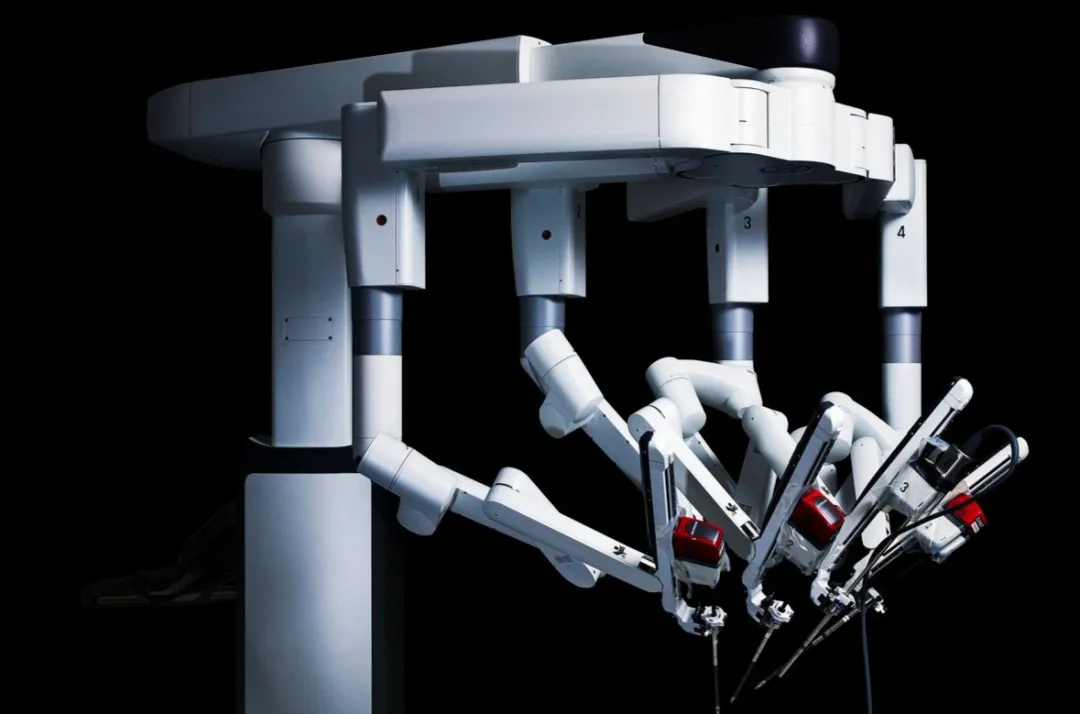
(图中为达芬奇,非论文中的机器人)。
图片来源:Problem Based Learning
3.从手机械臂设计
从手机器人机械臂的最终构型如图所示(跟上图中的达芬奇架构不太一样)。机械臂是具有个冗余自由度的七自由度机械臂,由定位关节和远心机构组成,关节1~关节4为定位关节,关节5~关节7组成远心机构,其中关节1和关节7为直线移动关节,其余的几个关节都是转动关节。
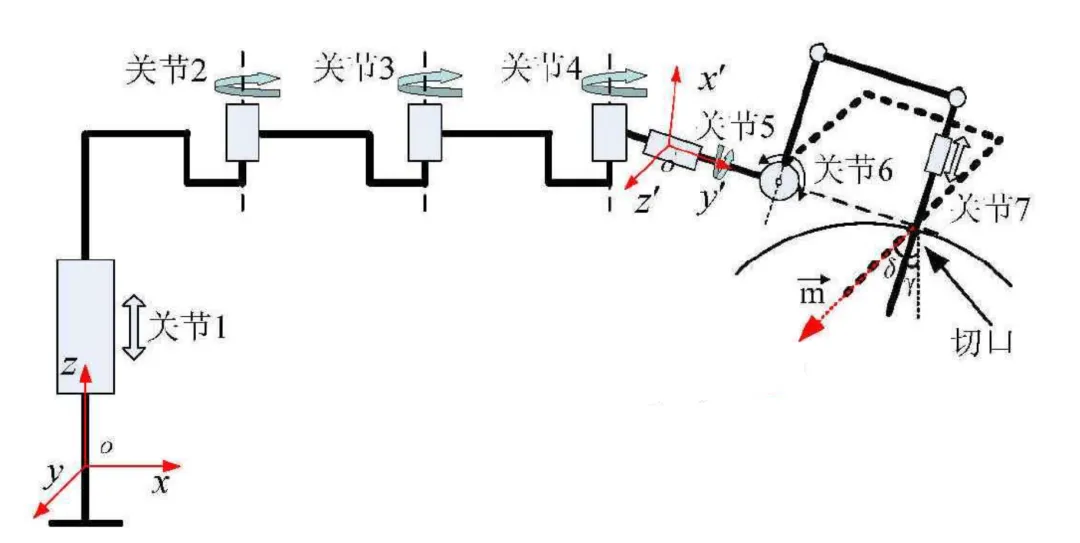
各关节的功能分别是:关节1来设置机械臂在垂直方向上的位置,使机械臂末端所夹持的手术器械(腹腔镜)在重直方向上的位置符合切口位置要求;关节2~关节4为三个平行的摆动关节,用来设置机械臂在水平方向的位置,使得机械臂末端所夹持的手术器械(腹腔镜)在水平方向上的位置符合切口位置要求;
关节5~关节7组成远心机构,用来夹持手术器械(腹腔镜)并保证手术器械(腹镜)绕手术切口做远心运动,其中关节5用来实现手术器械(腹腔镜)绕手术切口的偏摆远心运动,关节6用来实现手术器械(腹腔镜)绕手术切口的俯仰远心运动,关节7用来实现手术器械(腹腔镜)沿切口的探入运动。
为了防止手术过程中远心机构与病人身体发生干涉,根据腹部气腹形状,将远心机构设置成与水平面成30夹角的配置方式,这样可以避免与患者腹部的干涉。

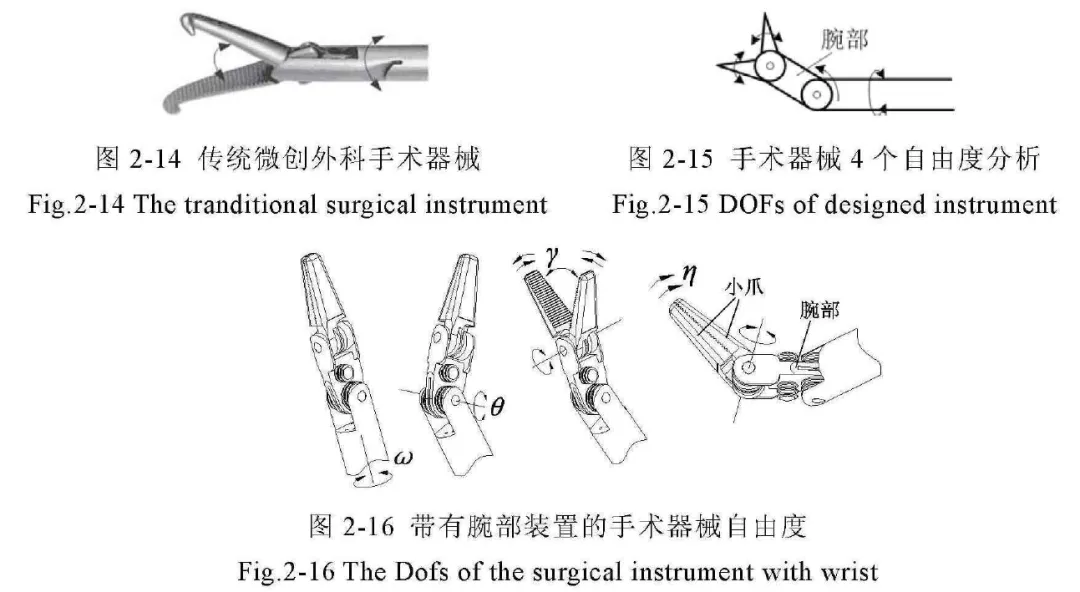
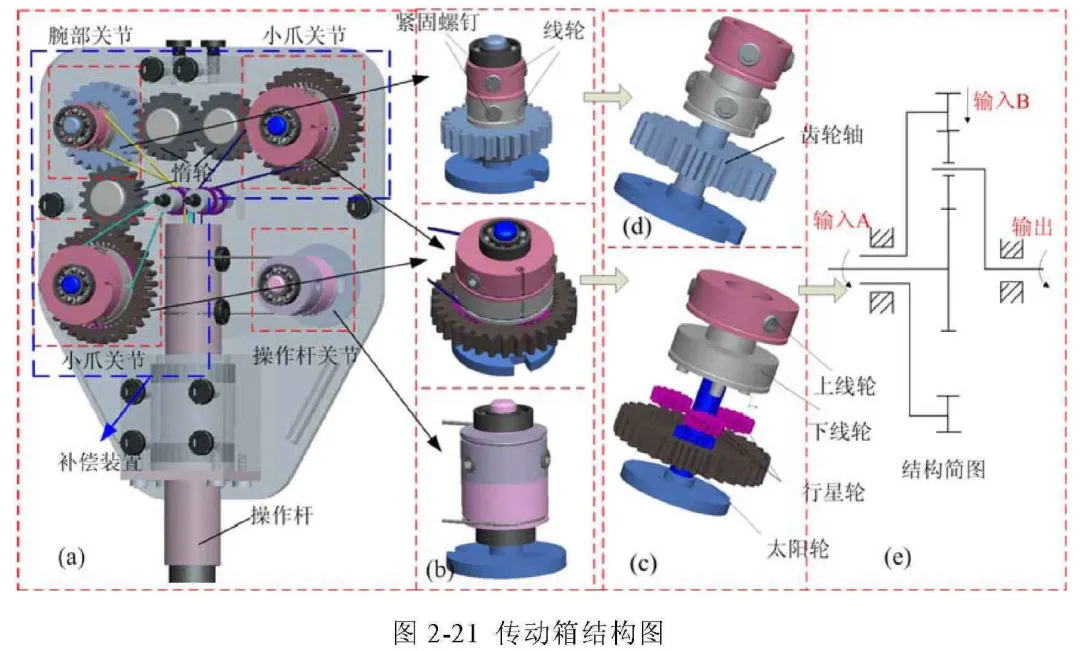
4.手术器械设计(带腕部关节的设计)
图片来源:Problem Based Learning
图片来源:Problem Based Learning
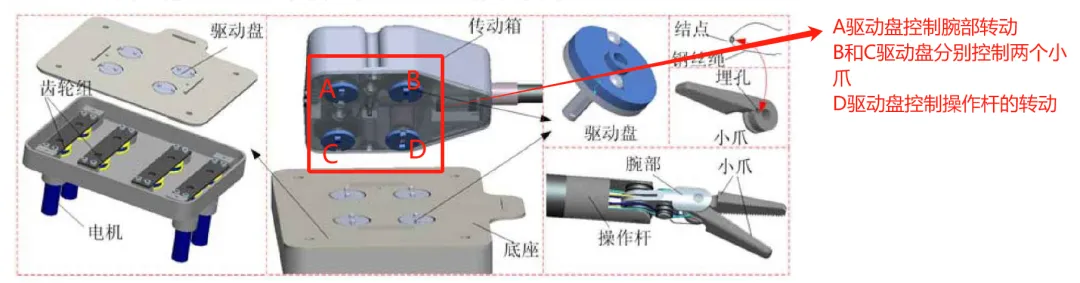
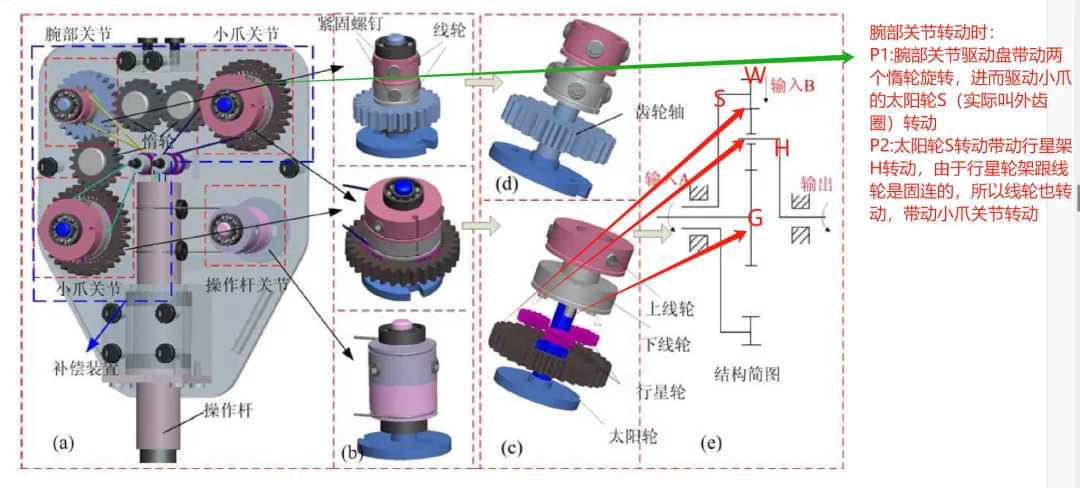
当腕部关节运动时,动力由底座电机传给腕部关节驱动盘并驱动腕部齿轮轴运动,与此同时,通过惰轮的动力传递,腕部齿轮轴将一部分动力传递给小爪关节的太阳轮,小爪关节太阳轮的转动带动着三个行星齿轮一起运动,进而带动小爪关节的线轮运动,末端组件小爪得到运动补偿而消除耦合运动。小爪解耦补偿运动的动力由腕部提供,解耦运动伴随着腕部运动同时进行。
图片来源:Problem Based Learning
图片来源:Problem Based Learning
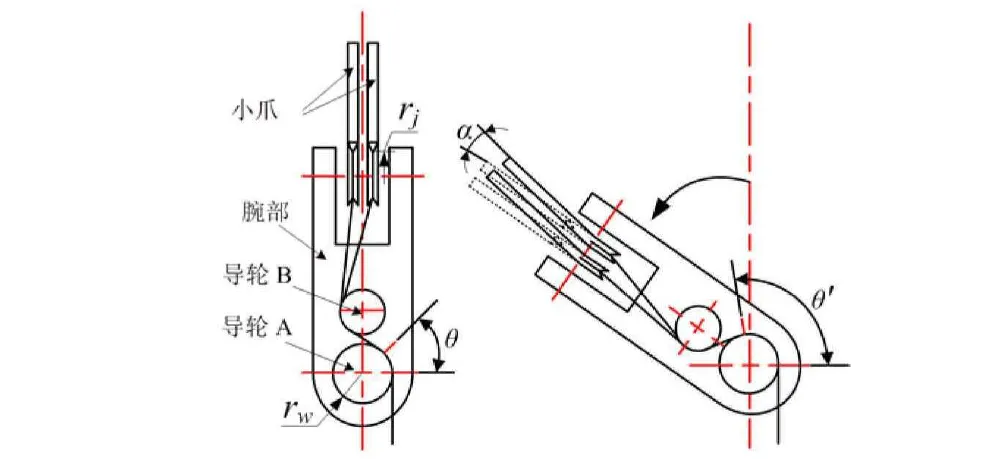
由以上分析可知,小爪的实际运动量为解耦运动和电机驱动运动的叠加。通过合理设置传动装置传动比,可以实现在腕部运动的同时实现小爪的解耦运动。
具体传动比计算过程请直接参阅原论文。
最终要达到的效果就是:
1.电机驱动腕部关节盘时,器械末端只有腕部关节转动(小爪不动)
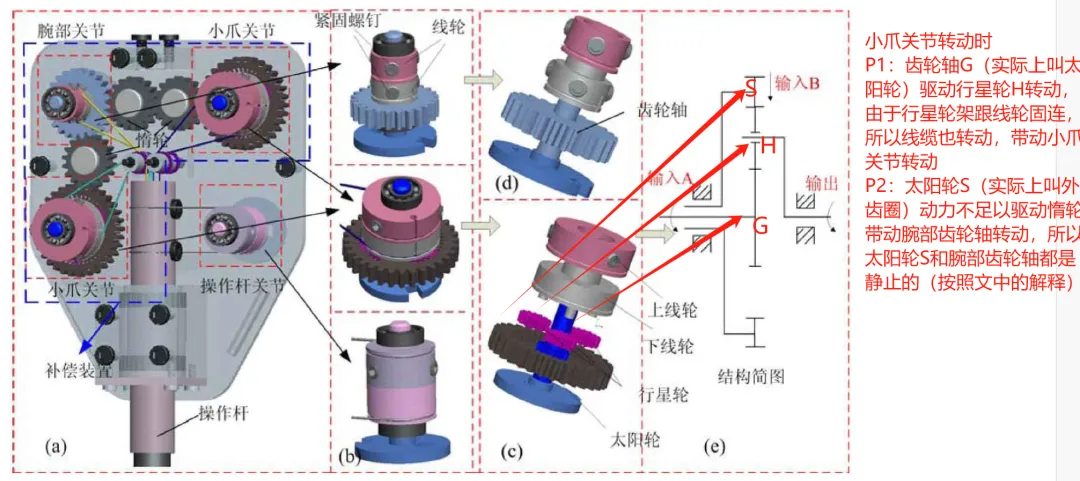
2.电机驱动小爪关节盘时,器械末端只有小爪关节转动(腕部和另外一个小爪臂不动)
这样电机的转动跟末端执行机构的转动就可以做到一一对应了。
文章来源:Problem Based Learning
若涉及侵权,请立刻联系删除
关键字:



