



01
内容概览
现有技术缺点
-
接触不良:传统的可吞食设备因胃部随机位置和刚性胶囊与柔软胃组织的不匹配,导致电极与组织接触不良,无法提供稳定的电刺激。 -
导航不足:多数设备缺乏自主导航能力,无法精准定位电极到达胃腔的合适位置。
-
停留时间短:大多数设备只能在胃内停留数小时,无法长期有效刺激组织。
-
电池寿命有限:设备电池容量小,无法提供长时间的电力支持,并且对电刺激的控制有限。
文章亮点
-
无电池设计:开发了一种无需电池的机器人界面(IngRI),通过近场电感耦合技术为设备供电,实现非侵入性胃肠道电刺激。
-
组织粘附增强:采用生物启发的水凝胶界面,确保设备与胃组织的牢固接触,并可在胃内停留至少48小时。
-
精准导航:设备带有小型永久磁铁,可通过外部磁铁实现远程定位和导航,确保电极准确到达指定胃部位置。
-
可编程电刺激:能够无线传递可编程电脉冲,精确控制电刺激的强度、频率和脉宽,以提高治疗效果。
应用场景
-
胃肠道疾病治疗:可用于治疗如恶心、呕吐、胃动力障碍、肥胖和糖尿病等胃肠道疾病,通过调节电刺激控制相关激素水平。
-
内分泌疾病管理:设备能够显著增加“饥饿激素”水平,展现了在调节食欲和治疗其他内分泌疾病上的潜力。
-
非侵入性神经调节:提供了一种无创的胃肠道神经调节方式,具有治疗神经退行性疾病(如阿尔茨海默病和帕金森病)的潜力。
总结
由电子医疗器械展知悉,该研究提出了一种创新的、可吞食的、无线供电的软体机器人界面(IngRI),成功解决了接触、导航、保留和供电(C-N-R-P)等技术挑战。设备在体内外实验中表现出优越的电极-组织接触和长时间胃内滞留能力,未来有望在门诊环境下实现便携应用,延长使用寿命,并集成传感器以实现闭环神经调节和更广泛的临床治疗。
文章名称:An ingestible, battery-free, tissue-adhering robotic interface for non-invasive and chronic electrostimulation of the gut
期刊:Nature Communications
文章DOI:
https://doi.org/10.1038/s41467-024-51102-5
通讯作者:浙江大学南科望(Kewang Nan),香港城市大学于欣格( Xinge Yu)和麻省理工学院Giovanni Traverso
02
图文简介
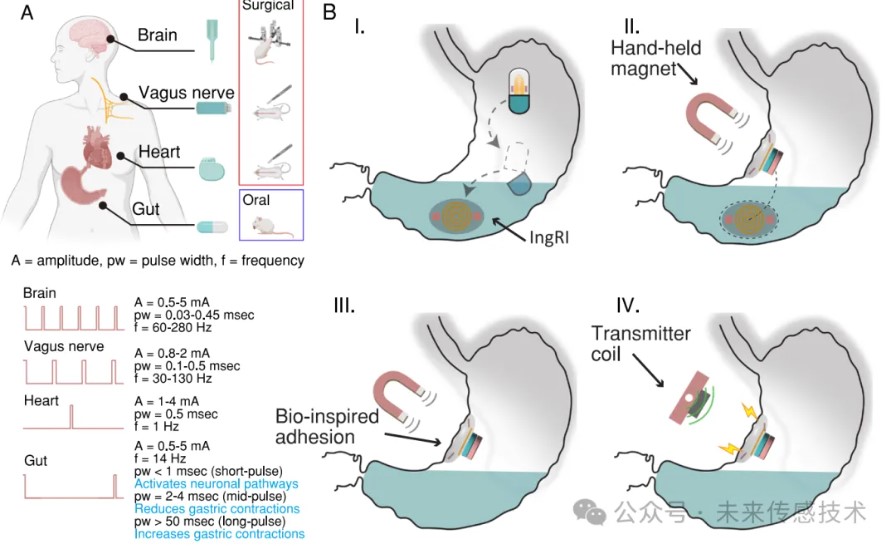
作者开发了一种可吞服的、无电池的、附着于组织的机器人接口(IngRI),该接口完全解决了C-N-R-P问题(图1)。
图片来源:未来传感技术
图1 可吞食的无电池组织粘附型机器人界面(IngRI),一种用于肠道的无线长期电刺激装置。A 具有治疗相关性的电刺激,适用于表现出电兴奋性的器官和组织及其典型给药方法。B IngRI的作用机制:(I)明胶胶囊在肠道内溶解并释放折叠的IngRI。(II)IngRI在外部手持磁铁的辅助下导航至所需的胃部位置。(III)IngRI通过仿生水凝胶粘附在胃黏膜上,并激活符合电极与组织的接触。(IV)IngRI通过近场感应耦合传递可编程的电脉冲。
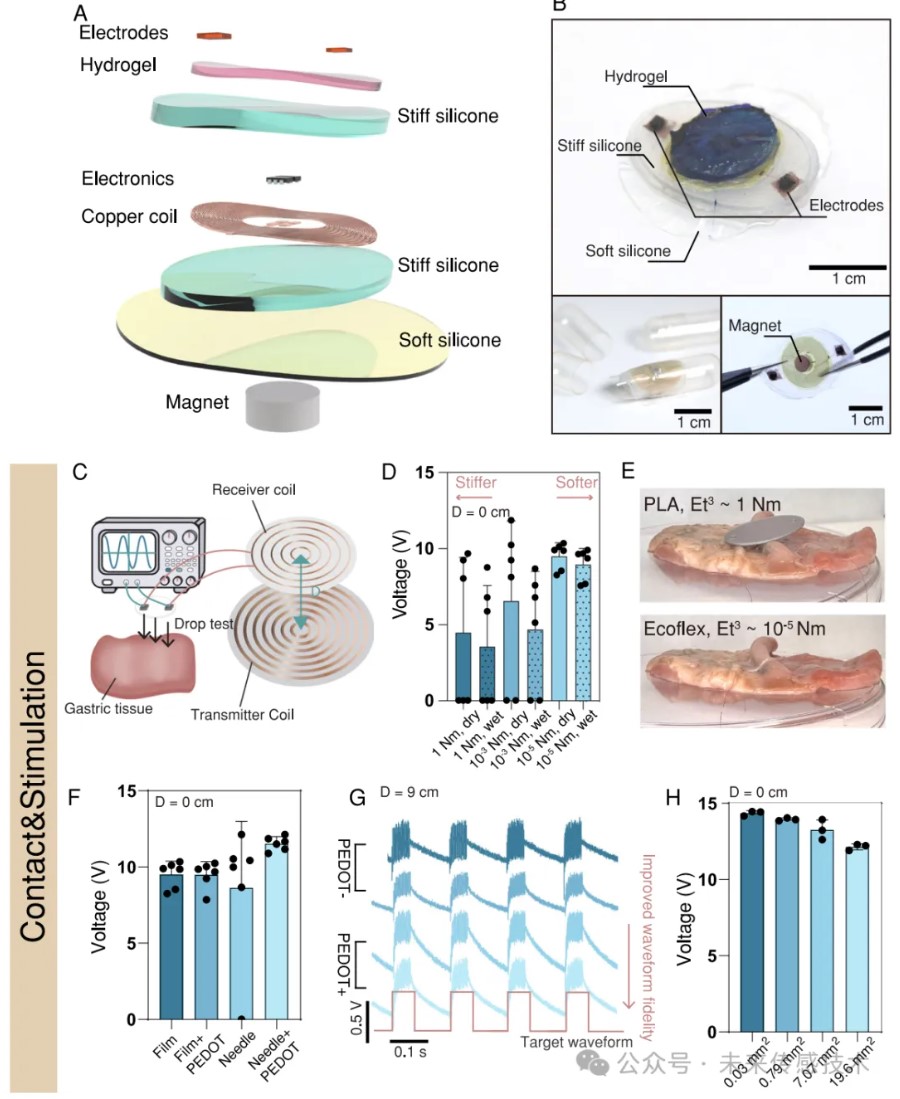
多层结构的IngRI(图2A)由以下层组成:(1)一种仿生粘合层,由冻干的海藻酸钠-聚丙烯酰胺(Alg-PAAm)水凝胶制成,表面涂覆有乙基(N,N-二甲基氨基丙基)氨基脲(EDC)-N-羟基琥珀酰亚胺(NHS)-壳聚糖桥聚合物(厚度约为1000 µm)和软硅胶(Ecoflex 00-30,厚度约为100 µm),以实现与胃黏膜的粘附界面;(2)一个刚性硅胶封装的功能层(Sylgard 184硅胶,厚度约为500 µm),支持一个柔性薄膜铜线圈(厚度约为18 µm),用于接收无线传输的电力,随后通过焊线连接到一对刺激电极;(3)一个小型钕磁铁(直径约为7.5 mm),以便在摄入后实现磁导航,并为水凝胶粘合界面的开始提供必要的压缩力。
图片来源:未来传感技术
图2 IngRI的设计、接触和刺激特性。A IngRI的爆炸视图,显示多层结构。B 上部:标注主要组件的IngRI光学图像。左下:IngRI折叠并装入明胶胶囊内。右下:IngRI在显著变形的情况下,展示其灵活性。比例尺,1 cm。C 示意图展示了掉落测试装置:IngRI连接至接收线圈,接收来自发射线圈的无线电源,同时连接至示波器以显示在不同控制参数下的输出电压。D 不同刚度的IngRI在湿或干猪胃组织上掉落后的平均(n = 6)输出电压结果。结果清晰显示出较小的刚度导致更高的平均输出电压和更小的误差条。E 在掉落后,刚性(上)和柔性(下)版本的IngRI与胃组织接触的光学图像。F 使用不同电极材料和配置的平均(n = 6)输出电压。G 代表性输出脉冲(蓝色脉冲)与(gel+)和不带(gel−)PEDOT:PSS作为接触界面的情况进行比较,并与理想波形(棕色脉冲)进行对比。带有明胶的电极显示出更好的波形保真度。H 不同电极面积下的平均(n = 3)输出电压,显示输出电压与接触面积呈反比关系。所有图中的误差条表示标准差(SD)。
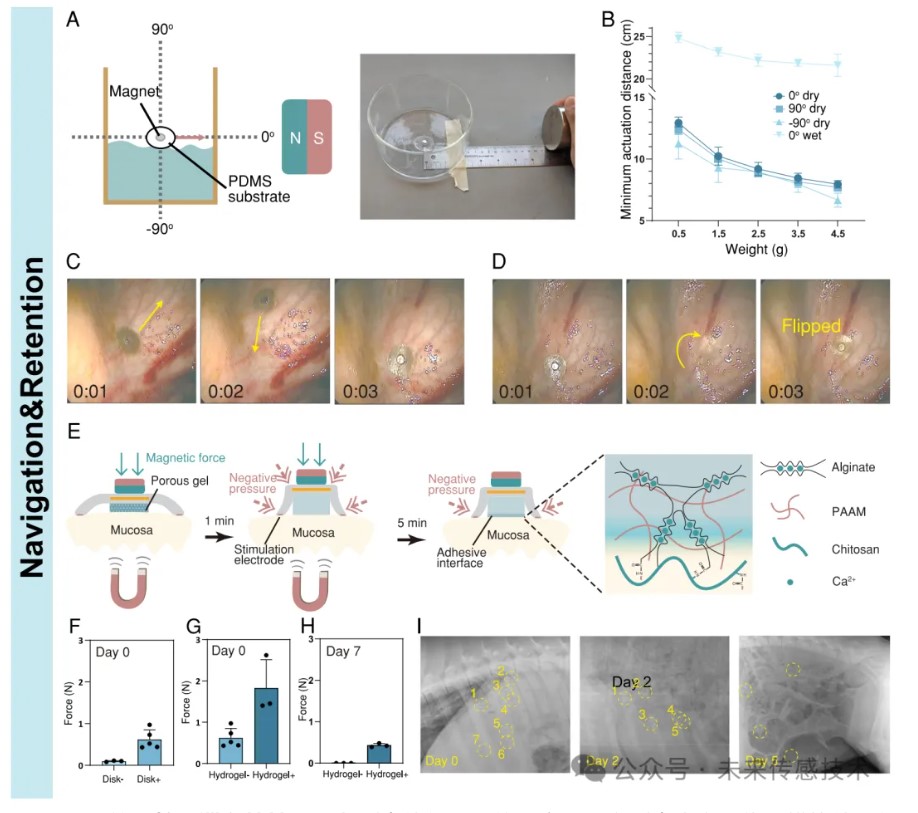
为了支持可吞服设备的导航,作者通过将一个小型钕磁铁附加到IngRI上,实施了一种简单、低成本且非侵入性的方法,这使得可以利用一个较大的手持钕磁铁从体外进行远程操控。
图片来源:未来传感技术
图3 IngRI的导航和滞留特性。A 左侧为体外设置的示意图,右侧为光学图像,模拟使用外部手持钕磁铁进行IngRI的体内导航。B 在不同方向和湿度条件下,使用手持钕磁铁操控IngRI时的最小驱动距离,数据来源于(A)中的设置。每个数据点为n = 3个样本的平均值。数据以均值 ± 标准差(SD)呈现。C、D 展示了IngRI的体内导航和翻转能力。图片摘自补充影片1和2。E 旨在增强IngRI胃内滞留的生物启发水凝胶粘合剂的示意图。简而言之,该机制依赖于一层软硅胶圆盘和冻干水凝胶的双层结构,二者结合提供物理和化学粘附,以克服胃内的挑战性环境。F 在第0天,IngRI在有(disk+)和没有(disk−)软硅胶圆盘的情况下的平均剥离力。G 在第0天,IngRI在有(gel+)和没有(gel−)冻干水凝胶的情况下的平均剥离力。H 在第7天,IngRI在有(gel+)和没有(gel−)生物启发水凝胶粘合剂的情况下的平均剥离力。对于(F)和(G),每个数据点为n = 3或5个样本的平均值。I 在第0天、第2天和第5天的X射线照片,分别跟踪带有生物启发水凝胶粘合剂的设备在猪胃内的滞留情况。7个设备中有5个在摄入48小时后完好无损。所有图中的误差条表示标准差(SD)。
图片来源:未来传感技术
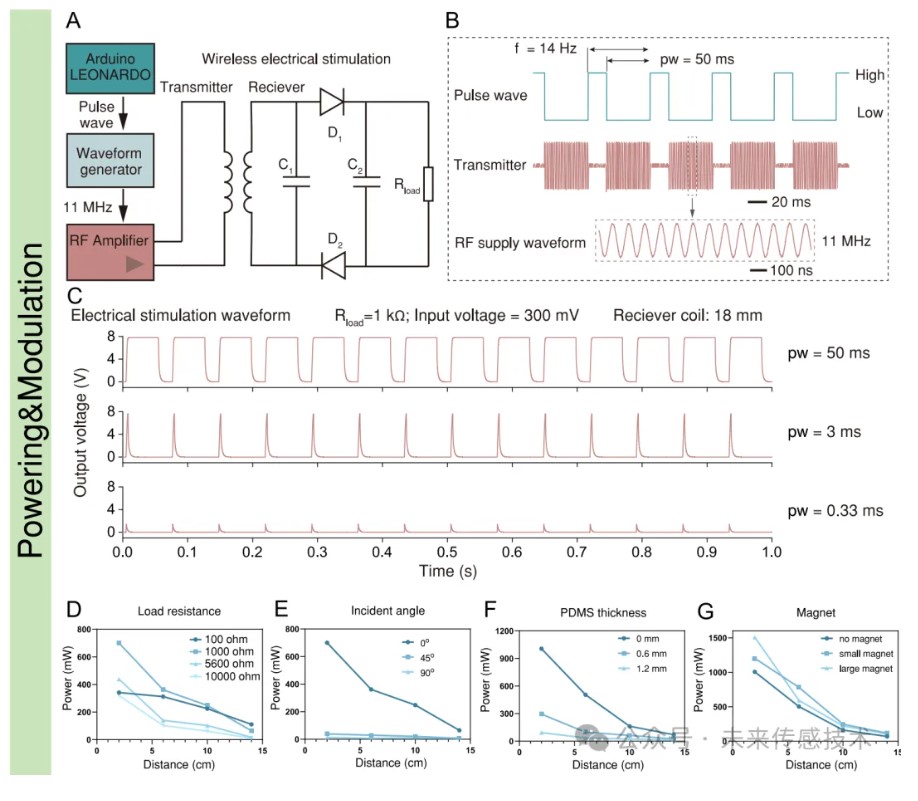
图4 IngRI的供电和调制特性。A 示意图展示了近场感应耦合的电子设置。B 将脉冲波转换为高频脉冲列,以便无线传输至接收线圈。C 在不同脉冲宽度(0.33、3和50ms)下,频率为14 Hz、负载电阻为1000欧姆、接收线圈直径为18mm的代表性输出波形。D–G 输出功率作为发射器和接收线圈之间距离的函数,分别在不同的(D) 负载电阻、(E) 入射角、(F) PDMS封装厚度和(G) 磁体存在情况下进行测量。
IngRI的疗效在麻醉猪模型中进行了评估(见图5)。
图片来源:未来传感技术
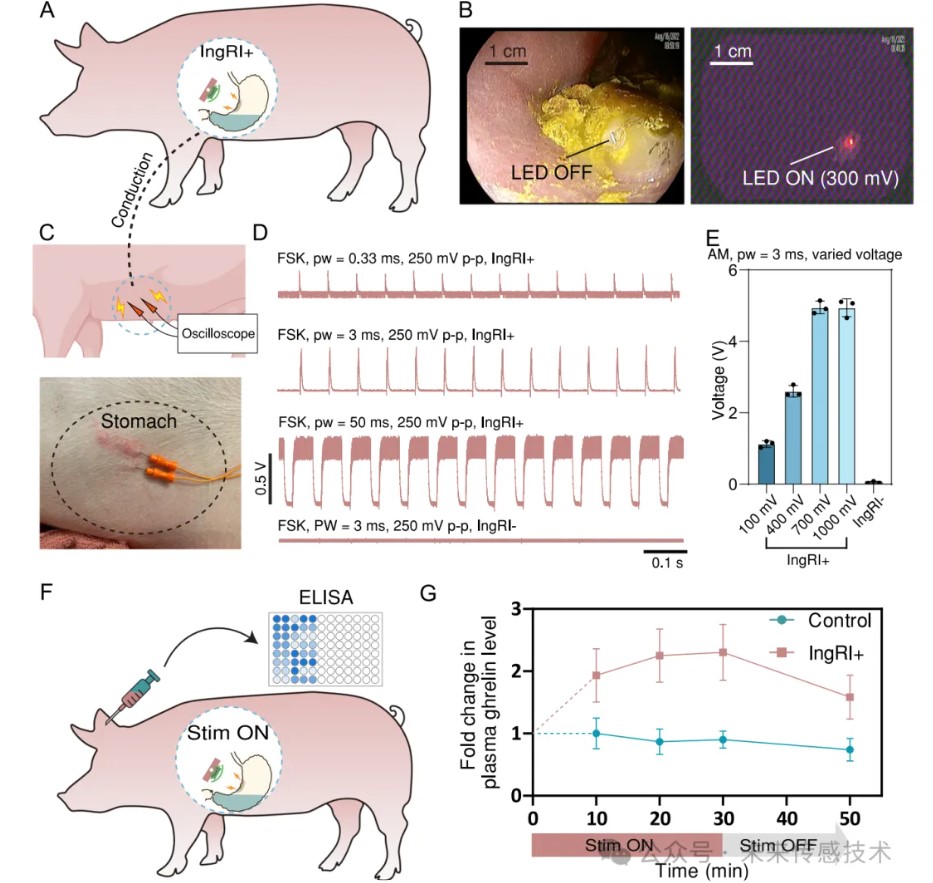
图5 IngRI的体内验证。A 使用麻醉猪模型进行体内实验的示意图。B 内镜图像显示在肠道内使用IngRI对LED设备进行无线供电。C 测量使用IngRI传递的导电信号的体内实验示意图。针电极放置在猪的腹部,以检测和记录相应的波形。D 从皮下针电极记录的波形,显示在FSK调制方案下以不同脉冲宽度传递的波形。底部展示了一个没有IngRI在肠道内的对照实验,以表明无线传输并未干扰皮下记录。E 在AM调制方案下,使用不同输入电压时皮下记录的平均(n = 3)输出电压。数据以均值 ± 标准差(SD)形式呈现。F 在麻醉猪中刺激IngRI的血浆胃饥饿素水平测量示意图。G 血浆胃饥饿素水平随时间变化的平均(n = 3)倍数变化(IngRI,红色;对照,绿色)。所有图表中的误差条表示标准差(SD)。数据以均值 ± SD形式呈现。数据来自两个不同的猪模型,分别在三天内收集,因此被视为生物学上不同。
想了解更多请前往电子医疗器械展
文章来源:未来传感技术
若涉及侵权,请立刻联系删除
关键字:



