



由有源医疗设备展知悉,口腔医学美学是现代口腔医学的重要分支和组成部分,主要围绕牙体硬组织美学、牙周软组织美学、牙列空间美学、颌面部美学等领域,开展多学科融合的临床诊疗和研究工作 [ 1 ] 。近年,随着科技革命和产业变革的深入发展,学科交叉融合不断推进。医学与工学、理学等不同学科的交叉融合,成为推动临床医学进步的新引擎,也为口腔医学美学的发展带来新机遇。
医用机器人具有鲜明的跨领域和学科交叉特性,发展至今已有近40年的历史。广义上,医用机器人是指用于医疗领域的各类机器人,包括手术机器人、康复机器人、医疗辅助机器人、服务机器人等 [ 2 ] 。狭义上,医用机器人特指微创手术机器人,可辅助医师用更精准和微创的方式进行手术。本文所述的机器人技术,即狭义上的手术机器人技术。1985年,Kwoh等 [ 3 ] 开展首例有记录的机器人辅助手术。1987年,美国批准全球第一个手术机器人——NeuroMate(Sacramento,美国)上市 [ 4 ] 。在口腔医学领域,国外和国内首个口腔手术机器人分别于2017年(Yomi ®,Neocis,美国)和2021年(瑞医博 ®,北京柏惠维康科技股份有限公司)获批上市。此后,凭借微创、准确、重复性好等优势,口腔手术机器人技术进入快速发展阶段 [ 5 , 6 , 7 , 8 ] ,我国口腔手术机器人的研究和应用现总体上处于国际先进水平。
随着计算机软件、硬件以及计算力的进步,机器人技术逐渐融合计算机视觉技术、规划决策系统、大数据统计分析等人工智能技术,已不是单纯的机械装置。在口腔医学美学领域,目前机器人的研究成果日益增多,临床应用也开始起步。口腔医学美学治疗主要包括美学设计、美学表达及美学实现三个环节 [ 9 ] ,现阶段美学设计与美学表达仍主要依赖临床医师的经验和操作,人工智能与机器人技术尚未普及应用。当前机器人的优势主要体现于美学实现环节,即利用机器人辅助精准实现医师制订的治疗方案。本文浅析机器人技术在牙体硬组织美学、牙周软组织美学、牙列空间美学、颌面部美学中的研究和应用现状,探讨目前存在的问题和未来的发展趋势,为口腔医学美学领域机器人技术的研究和应用提供参考。
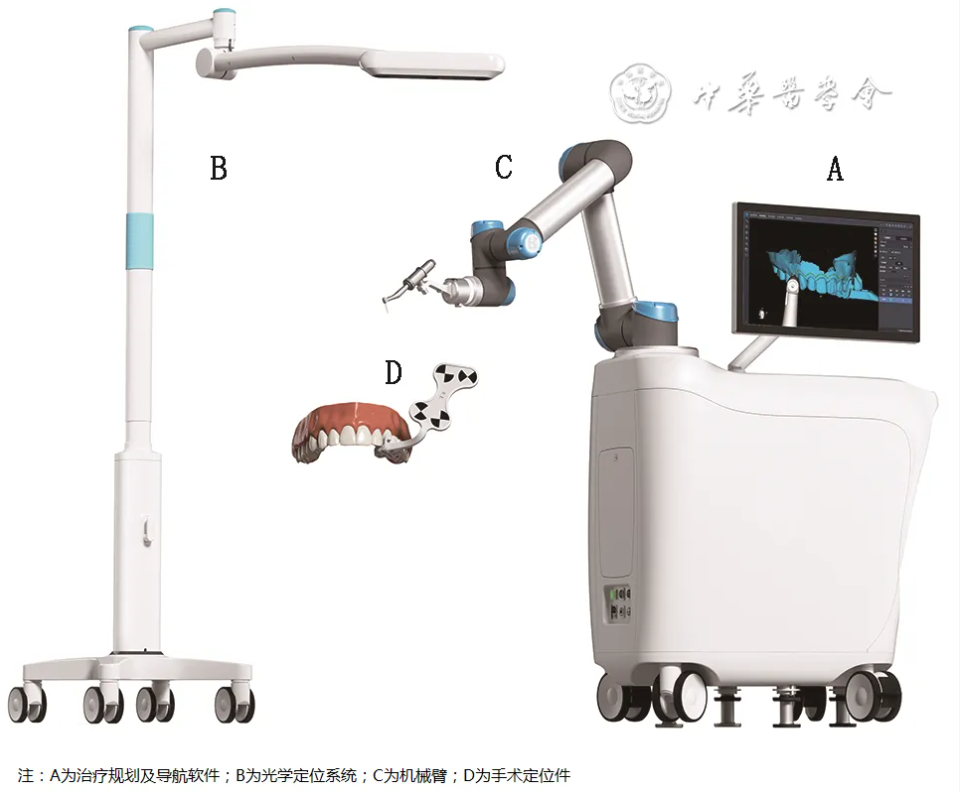
图片来源:中华口腔医学杂志
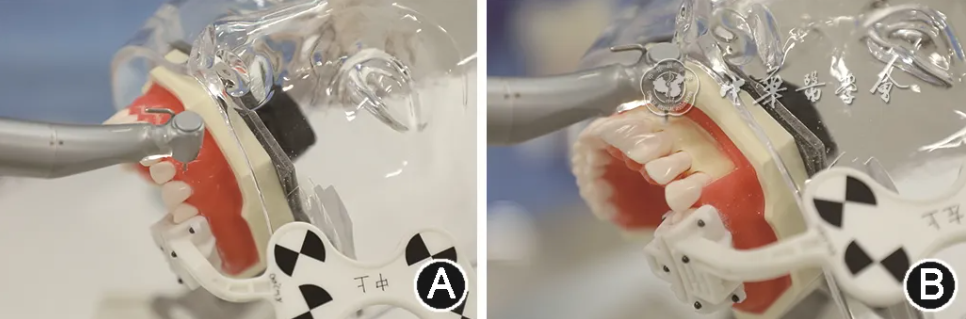
图片来源:中华口腔医学杂志
牙列空间美学是指牙列形态、排列和完整性符合美学要求。牙列空间美学缺陷主要包括牙齿缺失导致的牙列缺损和牙列缺失,以及牙齿位置和排列异常导致的错𬌗畸形,治疗方案包括固定修复、活动修复、种植修复、固定矫治、隐形矫治等 [ 1 ] 。目前,机器人技术在牙列空间美学领域的应用,主要是牙齿缺失种植修复中的种植体植入术。
种植修复中理想的种植体三维位置至关重要,机器人凭借其稳定的优势,可获得较准确的种植体植入位置 [ 17 , 18 ] 。2001年,Boesecke等 [ 19 ] 率先提出机器人引导的种植体植入系统,由医师控制机械臂植入种植体,手术精度较低,种植体位置偏差为1~2 mm。经过20余年的发展,目前国内外已有多款口腔种植机器人陆续上市,关于种植机器人的体外实验、体内试验和临床应用日渐增多。由于种植体植入术仅涉及单一维度的手术路径,相比牙体硬组织和牙周软组织美学处理,种植手术的路径规划更简捷。因此,种植手术机器人是目前相对成熟的口腔手术机器人。临床初步研究显示,机器人种植手术的种植体颈部和根尖偏差以及角度偏差分别约为0.6和0.7 mm以及1.6° [ 20 ] ,可基本满足临床需求。笔者团队较早开展机器人种植手术的研究、应用和推广,结果显示,机器人可提高种植修复的精度,改善治疗效果( 图3 ),且医疗机构、医师、患者和研究者对机器人的关注度和接受度逐渐增加。
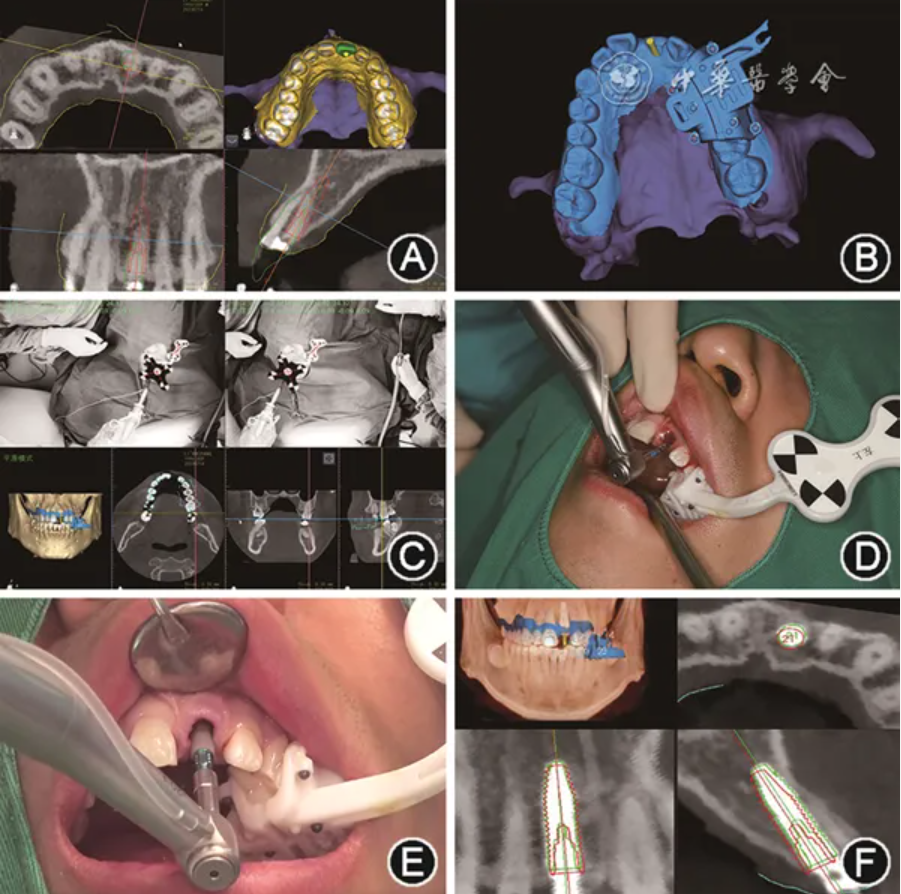
图片来源:中华口腔医学杂志
想了解更多请前往有源医疗设备展
文章来源:中华口腔医学杂志
若涉及侵权,请立刻联系删除
关键字:



