



光声(PA)成像是一种非侵入性生物医学成像技术,它结合了光学和声学的优点,可提供高分辨率的结构和功能信息。本综述重点介绍了三维手持式 PA 成像系统的出现,它是一种应用于各种生物医学领域的前景广阔的方法。这些系统分为四种技术:使用二维超声阵列的直接成像、使用一维超声阵列的基于机械扫描的成像、基于镜像扫描的成像和基于自由手持扫描的成像。本综述全面概述了每种成像技术的最新研究成果,并讨论了解决系统局限性的潜在方案。
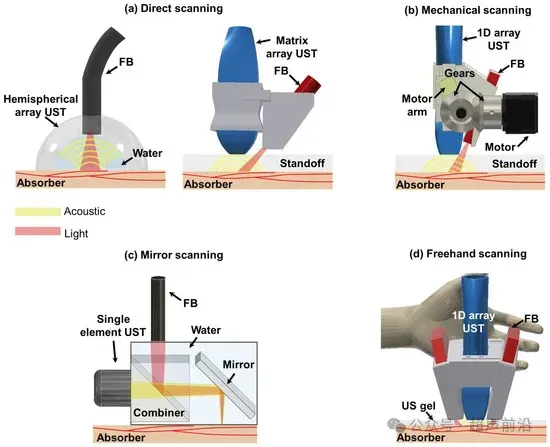
图 1. 三维手持式 PA 成像系统示意图
图片来源:超声前沿
1. 直接扫描包括利用各种形状的二维阵列超声传感器(UST),如半球形和矩阵形。这些二维阵列超声传感器能够获取三维图像数据,便于直接生成实时容积 PA 图像。

图 2. 基于直接扫描的手持式三维 PA 成像系统
图片来源:超声前沿
2. 基于机械扫描的三维手持式 PA 成像系统主要使用一维阵列 UST。ADTE借助机械运动,一维阵列 UST 可以收集扫描方向上的扫描数据。三维图像重建通常是通过堆叠扫描方向上的采集数据来完成的。由于一维阵列 UST 在横向提供阵列元件,因此可在横向实施波束成形。

图 3. 基于机械扫描的手持式三维 PA 成像系统
图片来源:超声前沿
3. 基于镜面扫描的三维手持式功率放大器成像系统使用带有不同镜面(如微机电系统(MEMS)或扫描振镜(GS))的单阵元 UST,以确保高速成像。这些系统的空间分辨率通常优于基于阵列的成像系统,ADTE因为它们使用的是单阵元高频 UST。其中一些系统可以提供紧密的光学聚焦,以提供更好的横向分辨率。但是,与其他系统相比,镜面扫描成像方式的穿透深度较浅。特别是,这些提供光学聚焦的系统的穿透深度仅限于 1 毫米,不利于用于临床成像。

图 4. 基于镜面扫描的手持式三维 PA 成像系统
图片来源:超声前沿
4. 所有类型的 UST 都可以实现手持扫描。在 UST 主体上安装全球定位系统 (GPS) 和光学跟踪器等附加装置,用于记录扫描位置。利用扫描数据和扫描位置信息,可实现三维图像重建。通过分析连续获取的自由扫描图像之间的相似性,还可以进行位置校准,而无需额外的硬件装置。

图 5. 基于自由手持扫描的三维手持 PA 成像系统
图片来源:超声前沿
三维手持 PA 成像技术具有广泛的应用潜力,包括临床前和临床应用。尽管三维手持 PA 成像技术得到了积极的开发和利用,但仍有三大局限性需要克服:运动伪影、各向异性空间分辨率和有限视图伪影。
ADTE硅光子技术的最新进展推动了片上光学 US 传感器的发展。压电式 US 传感器在小型化时往往会牺牲灵敏度,光学 US 传感器则不同,它在保持紧凑尺寸的同时,还具有高灵敏度和宽带检测能力。此外,最近在实现这些片上光学 US 传感器的并行检测方面也取得了突破。这些创新为创建超小型三维手持成像系统提供了令人兴奋的可能性。此外,多光谱成像、实时功能、混合模式和人工智能集成为改进未来的三维手持式 PA 成像系统带来了巨大的希望。这些系统可以为病人护理、早期疾病检测和图像引导干预带来新的机遇,最终增强我们对各种医疗状况的了解和管理。

图 6. 应用于三维手持成像系统的运动补偿
图片来源:超声前沿

图 7. 提高基于 UST 的一维线性阵列三维便携式成像系统性能的潜在方法
图片来源:超声前沿
文章来源:超声前沿
若涉及侵权,请立刻联系删除
关键词:



