



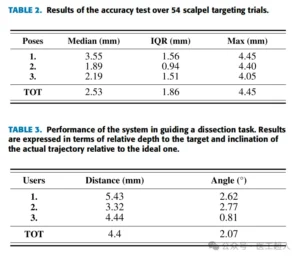
| 本期文章中,上海有源医疗器械展小编为大家介绍一种结合可穿戴增强现实(AR)和三维超声(US)技术以指导手术的新方法。这种集成系统设计用于在手术中提供实时反馈,特别是在执行需要高精度手动任务的情况下,例如切割未暴露的解剖或病理结构时保持安全边距。系统的核心是实时反馈手术刀的位置,为此,在标准手术刀上安装了传感器和构建相应阮家系统和算法。系统准确性通过两项实验研究进行量化评估:定位实验和初步用户研究,模拟了一个手术过程中的导航任务,结果显示该系统能够以平均0.65mm的精度引导切割任务,且理想与实际切割平面之间的平均角度误差为2.07度。 |

图片来源:
背景
传统上,超声技术因其安全性、低成本和设备的高可用性而被广泛用于诊断和介入治疗。然而,超声在手术中的应用面临操作复杂性,尤其是当手术需要同时操作超声探头和手术刀时,复杂度会更高。此外,超声图像通常在患者身体外的2D显示屏上单独显示,给手术操作带来了额外的难度。为了克服这些挑战,结合了增强现实(AR)技术和三维超声成像的新型手术导航系统应运而生。

图片来源:
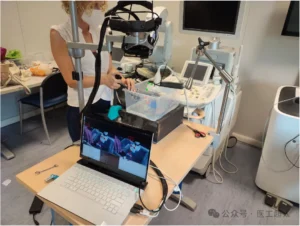
专为用户执行任务的手术进入而设计的AR+3D超声方案:在右下角,增强图像投射到显示器上,而3D声系统则监控实时超声采集
方法
上海有源医疗器械展介绍的集成系统,包括一个头戴式增强现实(AR)显示设备和一个三维超声(US)成像系统,以指导手术的操作任务。系统的关键是实时反馈手术刀的位置,为此,研究者将传感器安装在标准手术刀上。系统的准确性通过两项实验研究进行了量化评估:一项是定位实验,以评估估算手术刀至目标距离的准确性;另一项是初步的用户研究,模拟了一个切割任务,要求达到隐藏病变的预定距离。

图片来源:
集成系统的组件图:该图显示了各自的参考系统和相关的旋转翻译矩阵,WRS是World Reference System,即与遮阳板相关的全球参考系统;GFRS是Green Frame Reference System,是与超声探头相关的参考系统;PRS,即探头参考系统,是与超声采集体积相关的参考系统;LRS是目标病变参考系统;RFRS是Red Frame Reference System,是与手术刀光学框架相关的参考系统;TRS 是 Tip Reference System,它是与手术刀尖端相关的参考系统。另外,TG是WRS和GFRS之间的瞬时变换矩阵,TR是WRS和RFRS之间的瞬时变换矩阵,两者都是作为光学跟踪算法的输出而获得的。X 矩阵定义了 GFRS 和 PRS 之间的刚性变换,就像 Y 定义了 RFRS 和 TRS 之间的刚性变换一样。最后,W是通过超声体积的分割过程获得的PRS和LRS相关的变换矩阵。
1. 系统集成
-
设备配置:详细描述了头戴式增强现实显示器和三维超声成像系统的具体型号、规格及其集成方式。例如,如何将超声图像实时传输到AR显示器中,以及如何实现超声探头与AR系统的空间校准。
-
手术刀的改造与跟踪:介绍了手术刀上安装的传感器或标记器,以及如何通过AR系统实时跟踪其位置和方向。可能包括传感器的类型、安装位置、数据传输和处理方法。
图片来源:
2. 实验设计
-
定位实验:阐述了如何设置实验以评估系统在估算手术刀至目标距离的准确性。可能包括使用的模拟组织材料、设定的目标点、以及如何测量手术刀与目标点之间的实际距离与系统计算距离的差异。
-
切割任务实验:详细描述了模拟的切割任务,包括任务的目的、实验流程、参与者操作指南、评估标准等。例如,可能要求参与者使用系统指导下尽可能准确地切割至模拟病变的预定深度。

图片来源:
在任务执行期间查看遮阳板内部。RGB 摄像机获取的真实场景通过专门生成的虚拟内容进行增强。左上角显示手术刀尖端深度的指示
图片来源:
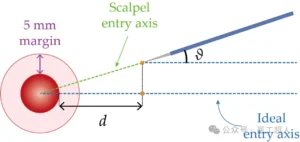
评估手术刀尖端深度。沿着理想进入轨迹的轴投影手术刀尖端的位置,并计算沿着该轴的所述点与病变表面之间的距离(图中的d)。还测量了理想插入计划与手术刀实际遵循的插入计划之间的角度 θ,但未显示在面罩的显示屏中。
结果
上海有源医疗器械展了解到,实验结果显示,该系统能够以平均0.65mm的准确性指导切割任务,且在理想与实际切割平面之间的平均角度误差为2.07度。这些结果表明,结合可穿戴AR和三维US成像的系统可以准确地指导深层手术任务,如非触觉乳腺肿瘤的切除,同时保证最佳的边缘清除。
图片来源:
讨论与结论
研究发现,虽然系统在提高手术导航的准确性方面表现出了巨大潜力,但仍存在一些局限性,例如手术刀上光学框架的笨重。尽管如此,提出的集成系统证明在提供即时的手术刀位置反馈和指导手术切割方面非常有效和精确,为未来的手术导航技术开辟了新的道路。
最后惯例一张AI图,期待AR+超声有更多的火花:
图片来源:
文章转载来源:
若涉及侵权,请立刻联系删除
关键字:



